



anders.nilsson@skogforsk.se
072 - 388 24 55


I takt med att den digitala teknologin blir bättre och mer tillgänglig öppnas nya möjligheter att effektivisera och förbättra skogsbruket. Vid Skogforsks Troëdsson Forestry Teleoperation Lab arbetar man med att utveckla och demonstrera fjärrstyrning och automation för skogsbruket. Skogforsk har bland annat tagit fram och visat upp välfungerande fjärrstyrning för skotare och automatisk stockplockning med hjälp av en stereokamera.
Inom forskningsprogrammet Mistra Digital Forest 2 har den automatiska stockplockningen vidareutvecklats och integrerats med fjärrstyrningen, så att operatören kan växla mellan manuellt och automatiskt läge vid lastning av stockar direkt från fjärrstationen.
Systemet består av ett antal olika ROS-noder (Robot Operating System). Fjärrstationen, varifrån operatören styr skotaren, har kompletterats med en surfplatta. Till denna surfplatta har en specifik ROS-nod med ett grafiskt användargränssnitt utvecklats. Detta gränssnitt erbjuder knappar för att interagera med de automatiska funktionerna, samt visar status för olika funktioner via färg- och textindikatorer.
En viktig princip i designen är den tydliga uppdelningen mellan manuell och automatisk lastning. Det automatiska systemet styrs uteslutande via surfplattan, medan de traditionella spakarna behålls för manuell kontroll. Med ett enkelt knapptryck på surfplattan kan operatören enkelt växla mellan manuell och automatisk lastning, vilket ger flexibilitet att anpassa styrningen efter olika situationer och arbetsmoment.
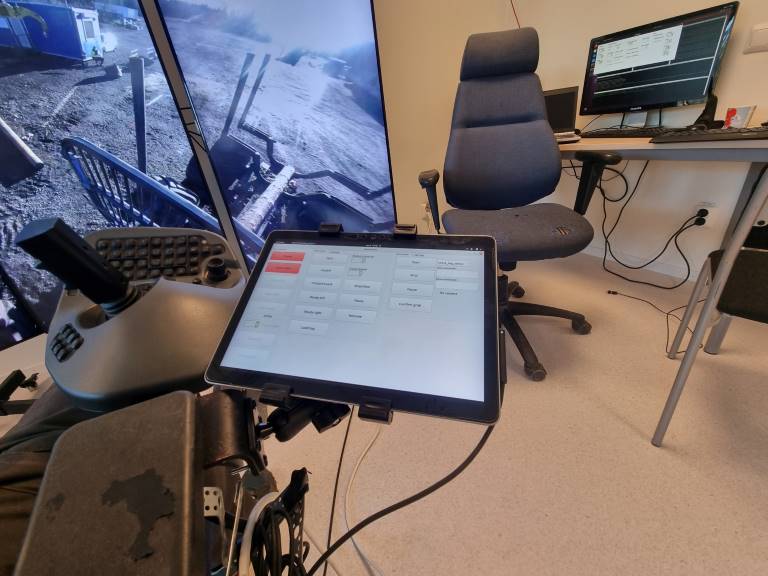 Microsoft Surface go 2-platta med Linux installerat och ett program som ger ett användargränssnitt.
Microsoft Surface go 2-platta med Linux installerat och ett program som ger ett användargränssnitt.
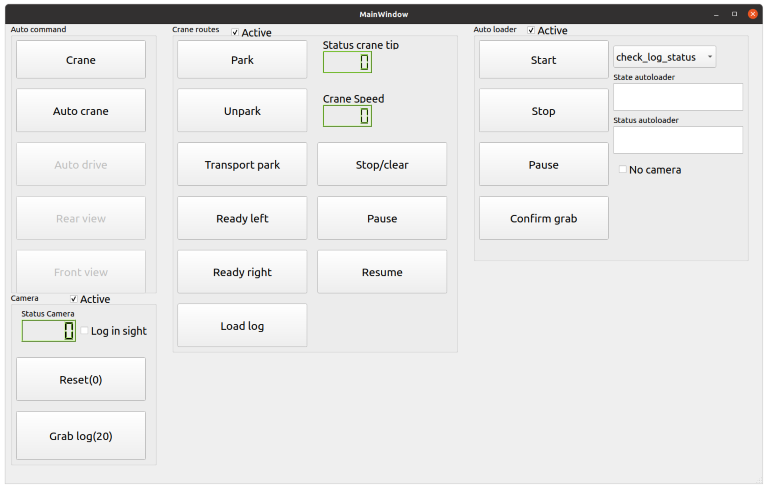 Det grafiska användargränssnittet. Varje box innehåller knappar som styr en egen del av systemet.
Det grafiska användargränssnittet. Varje box innehåller knappar som styr en egen del av systemet.
Från det grafiska gränssnittet kan man aktivera kranen, ställa in om skotaren ska lyssna på de automatiska funktionerna eller de vanliga spakarna, samt kontrollera de olika ROS-noderna. Man kan välja att köra crane routes-noden och kameranoden separat eller köra allt via auto loader-noden.
Crane routes-noden består av en rörelsehanterare som har en lista med punkter dit kranen ska röra sig. Den räknar ut med vilken hastighet de olika hydraulcylindrarna ska röra sig för att komma fram samtidigt, och byter till nästa punkt när kranen är framme. Listan med punkter är i detta fall skapade genom att man kör kranen till en punkt och bestämmer vad den ska göra vid den punkten, samt hur nära den måste komma till punkten innan den får byta till nästa punkt. Sedan sparas listan i .CSV-format och används till körningen. Rutterna behöver bara skapas en gång.
Ett exempel på en instruktion kan vara att öppna gripen vid punkt X X X X, där X X X X är slaglängden på de olika hydraulcylindrarna (Sväng, bom, sticka och utskjut). Själva styrningen av kranen är en anpassning av en ny metod för punkt-till-punkt-styrning av hydrauliska vikarmskranar (se Development of Point-to-Point Path Control in Actuator Space for Hydraulic Knuckle Boom Crane).
Kameranoden styr kranen samt greppar och vrider in stocken så att den går att lasta (kameranoden är närmare beskriven i kunskapsartikeln Stereokamera fungerar bra för autonom stockplockning).
Auto loader-noden är en tillståndsmaskin uppbyggd på samma sätt som Mission supervisor, vilken styrde en planteringsmaskin i ett tidigare projekt. Auto loader-noden tillför övergripande logik när kranen ska gå enligt statiska rutter med crane routes-noden eller att kameranoden ska styra. Auto loader-noden ger även möjlighet till övergripande felhantering. Fungerar inte de andra noderna enligt hur det är tänkt stänger den ner maskinen med ett felmeddelande. Det kan till exempel vara att det tar för lång tid att slutföra åtgärden.
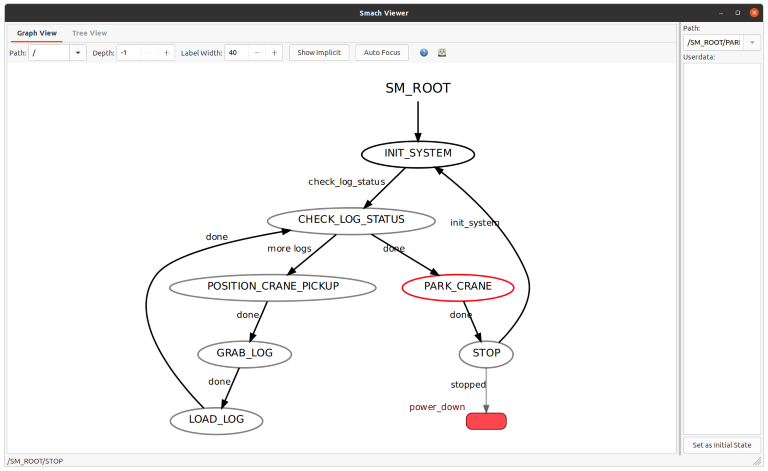 Logiken för auto loader. Varje ellips motsvarar ett tillstånd och pilarna visar vilka övergångar som kan ske mellan tillstånden. Övergångarna vid fel, manuellt stopp eller starta vid annat tillstånd än CHECK_LOG_STATUS är dolda för att göra bilden tydlig. Bilden är gjord med Ros Smach Viewer.
Logiken för auto loader. Varje ellips motsvarar ett tillstånd och pilarna visar vilka övergångar som kan ske mellan tillstånden. Övergångarna vid fel, manuellt stopp eller starta vid annat tillstånd än CHECK_LOG_STATUS är dolda för att göra bilden tydlig. Bilden är gjord med Ros Smach Viewer.
Logiken som är implementerad i de olika tillstånden beskrivs mer detaljerat nedan.
Startar systemet, noden väntar på kommando att börja. Det går att sätta vilket tillstånd maskinen ska börja köra från.
Kameranoden meddelar om den ser en stock. Gör den det går maskinen vidare till POSITION_CRANE_PICKUP. Ser den ingen stock går den till PARK_CRANE.
Crane route parkerar kranen på lasset och tillståndet ändras till STOP.
Tillståndet kan gå vidare till power_down eller tillbaka till INIT_SYSTEM och då kan man starta systemet när det ska användas igen.
Crane route-noden kör kranen till en redo-position och öppnar gripen fullt där kameran kan se gripen. När den är färdig ändras tillståndet till GRAB_LOG.
 Positionen kranen körs till i tillståndet POSISTION_CRANE_PICKUP.
Positionen kranen körs till i tillståndet POSISTION_CRANE_PICKUP.
Kameranoden plockar upp stocken, roterar in den och tillståndet ändras till LOAD_LOG.
 Positionen kameranoden greppar, lyfter och roterar stocken till.
Positionen kameranoden greppar, lyfter och roterar stocken till.
Crane route-noden lyfter in stocken över lasset och släpper. Tillståndet går tillbaka till CHECK_LOG_STATUS.
 Crane routes lyfter stocken till denna position för att sedan släppa.
Crane routes lyfter stocken till denna position för att sedan släppa.
 Stocken har lastats.
Stocken har lastats.
Detta är ett första steg mot att införa automatisk skotning. Nästa steg är att även implementera de noder som utvecklats för terrängkörning inom projektet Auto2, och skapa ett program som möjliggör att kunna generera körfiler som fungerar med systemet direkt från ruttplaneringverktyget Skotstöd. För att uppnå fullständig autonom skotning behövs också mer logik införas kring hur själva lasset på skotaren byggs upp. Just nu släpper maskinen stockarna på samma ställe, strax ovanför lasset. En framtida lösning skulle kunna innefatta kamerabaserad positionering och slutligen även automatisk avlastning till trave.
Möjligheten att växla mellan automatisk och fjärrstyrd styrning gör att de automatiska funktionerna kan börja användas redan innan en helt autonom skotning är på plats, då det är enkelt att gå in och göra manuella justeringar vid behov. De automatiska funktionerna kan minska operatörernas arbetsbelastning, och när de fungerar tillräckligt bra skulle det även kunna vara möjligt att en operatör kan övervaka flera skotare samtidigt.

