



morgan.rossander@skogforsk.se
073 - 369 33 41

Fjärrstyrning av skogsmaskiner kan förbättra arbetsmiljön för maskinföraren. En välfungerande fjärrstyrning är också ett steg mot ökad autonomi. Full autonomi, som skulle kunna hantera alla möjliga situationer maskinen kan ställas inför, kräver omfattande utveckling. Fjärrstyrning möjliggör en successiv övergång till autonoma funktioner. Systemets fördröjning är dock en avgörande faktor i arbetsmoment med höga hastigheter, såsom kranhantering. En studie vid Troëdsson Forestry Teleoperation Lab har därför undersökt hur olika nivåer av fördröjning påverkar påverkar förarnas prestation i en krankörningsuppgift. Förarna fick både köra med fjärrstyrning via ett VR-headset och från maskinhytten. Med fjärrstyrningen genomfördes uppgiften både med systemets egen minsta fördröjning och med två nivåer av extra pålagd fördröjning. Krankörningen var en standardiserad uppgift, där två stockar flyttades mellan två uppläggningspunkter på marken och två positioner i maskinens lastrede. Uppgiften är tillräckligt komplex för att inkludera många kritiska hanteringsmoment, samtidigt som den är kontrollerad nog att möjliggöra upprepade mätningar för statistisk analys.
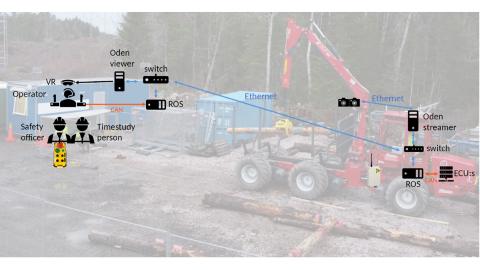
Studien genomfördes med den fullskaliga prototypskotaren Xt28, där fjärrstyrningen är implementerad med ROS (Robot Operating System) och systemet för videoöverföring till VR-headsetet är från Voysys. För att studera effekterna av större fördröjningar implementerades en funktion i ROS som möjliggör introduktion av artificiell fördröjning. Fjärrstyrningssystemets egen minsta fördröjning är 100 ms när det körs över nätverk. Effekten av fördröjningen för fjärrsystemet testades även vid nivåerna 150 ms och 200 ms, och jämfördes med krankörning från maskinhytten. Dessutom tillkommer maskinens interna fördröjning i hydrauliken och styrenheterna.
Operatörerna uppnådde förvånansvärt likvärdig prestanda oavsett fördröjning samt om de körde fjärrstyrt eller inte. Förarna rapporterade att de upplevde att kranen vid de större fördröjningarna, 150 ms och 200 ms, ibland fastnade vid snabba justeringar. Någonstans mellan 200 och 600 ms övergår upplevelsen till att kranen blir omöjlig att styra på normalt sätt. Som jämförelse ligger fördröjningen i en 4G-anslutning vanligen under 50 ms.
Upplevelsen av VR var generellt positiv, där avsaknaden av skakningar och oljud särskilt uppskattades. Däremot var stereoseendet inte helt perfekt, och i vissa situationer kunde kranens position upplevas som plötsligt förskjuten med 1–2 meter.
Mer forskning krävs för att täcka alla aspekter av skotningsarbete vid fjärrstyrning samt vad gäller maskinsäkerhet och arbetsmiljöförhållanden.


